¶ 1. 기본 설정
¶ 1-1. 화면 구성
다음은 Teaching 작성을 위한 화면 구성 요소입니다. Teaching 작성은 S-Viewer 화면에서 수행할 수 있습니다.
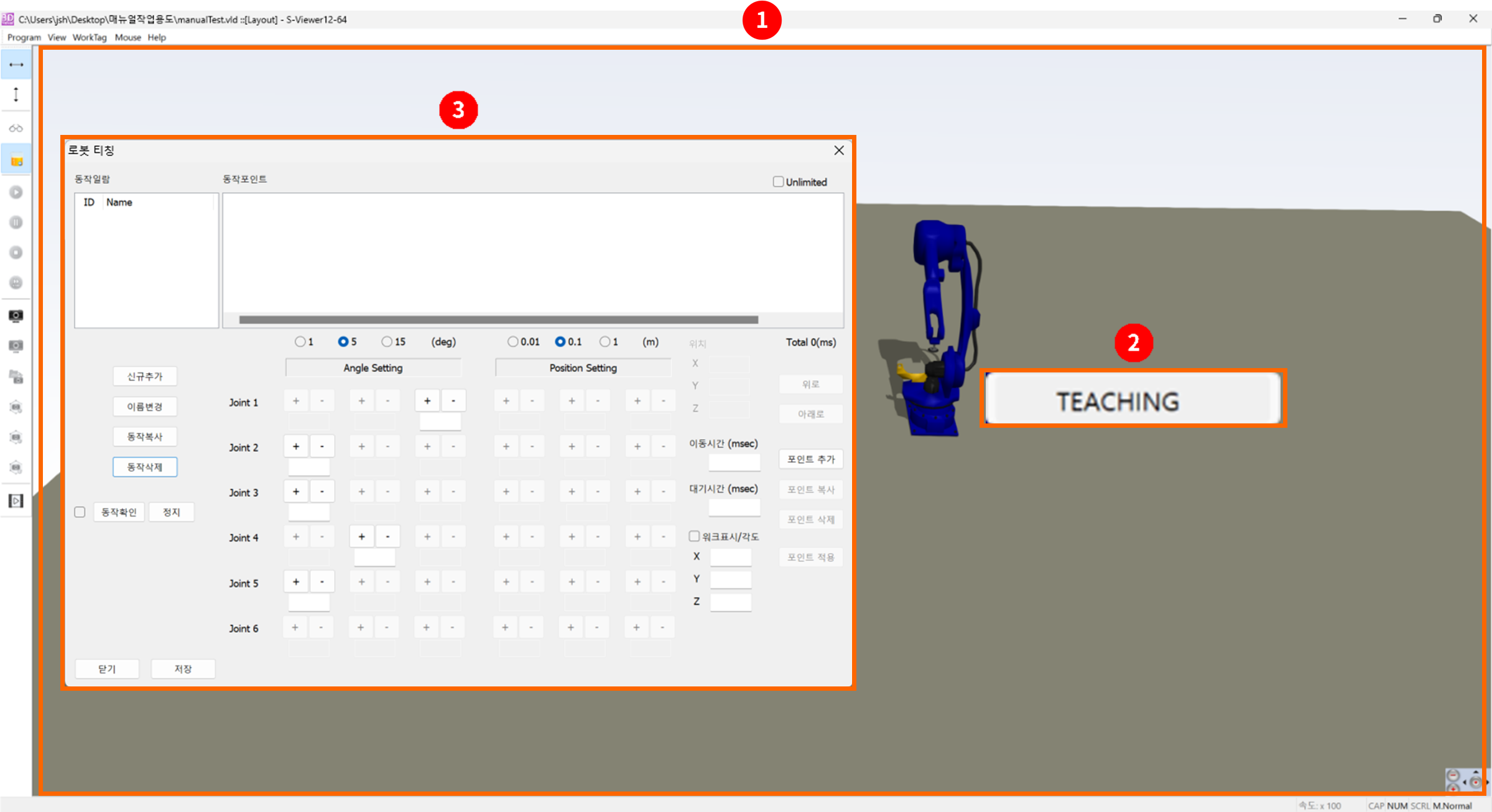
¶ ① 작업 영역(Work Space)
Layout Editor에서 작업한 레이아웃을 3D로 표시하며, 티칭 로봇 장비를 클릭하여 Teaching 작성을 수행할 수 있는 영역입니다.
¶ ② TEACHING 버튼
로봇 티칭 다이얼로그를 활성화하는 버튼입니다.
¶ ③ 로봇 티칭
Teaching 동작을 구성하고 통합적으로 확인하며, 세부 설정을 조정할 수 있는 다이얼로그입니다.
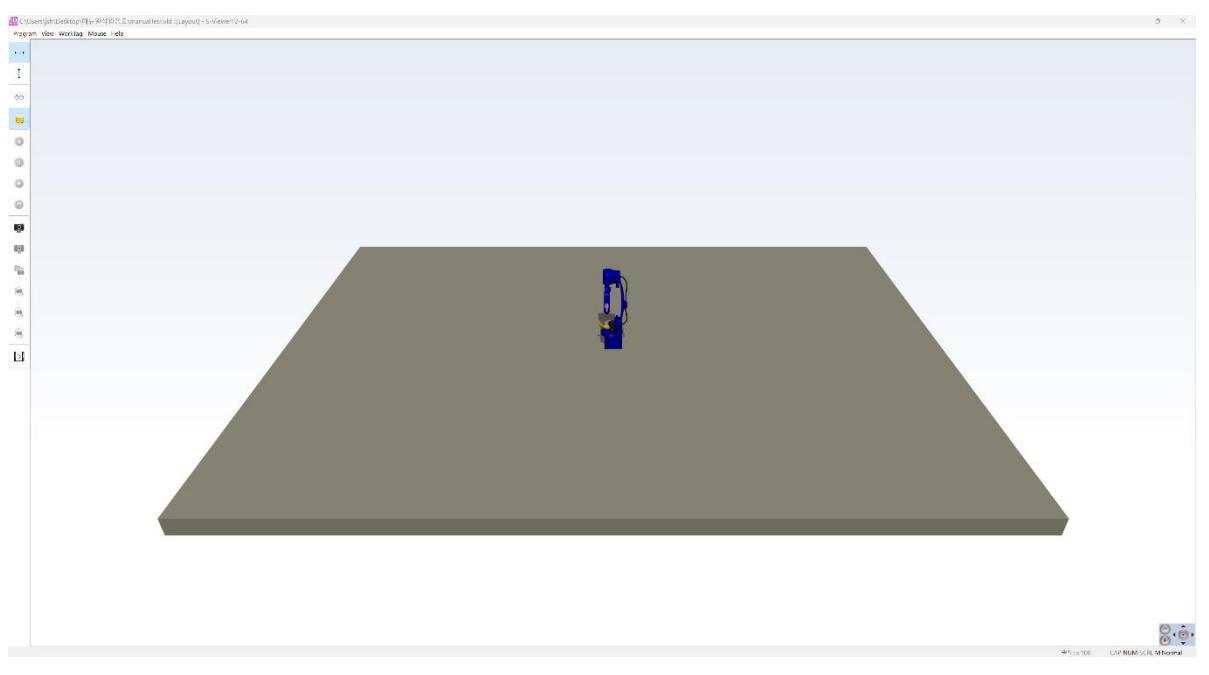
¶ 1-2. 작업 영역(Work Space)
작업 영역에서 티칭 로봇 장비의 동작을 실시간으로 확인할 수 있으며, 티칭 로봇 장비에 대해 작업된 Teaching 데이터를 적용하여 동작 내용을 검토할 수 있습니다.
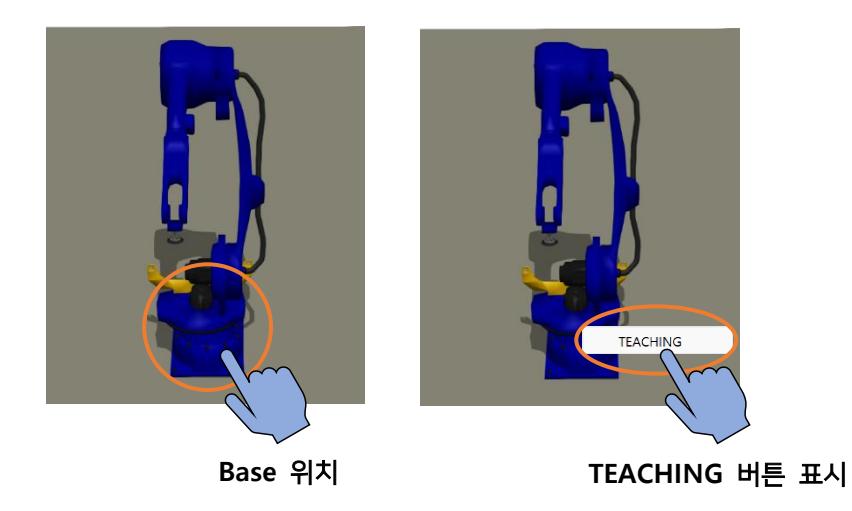
¶ 1-3. TEACHING 버튼
작업 영역에서 티칭 로봇 장비의 Base에 마우스 커서를 올린 후, 키보드의 Left Ctrl 키를 누른 상태에서 마우스 우클릭하면 TEACHING 버튼이 표시됩니다.
¶ 1-4. 로봇 티칭
로봇 티칭 다이얼로그에는 다음 항목이 포함됩니다.

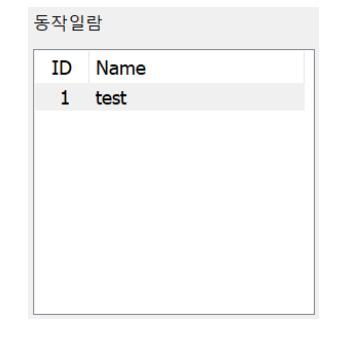
¶ (1) 동작 일람
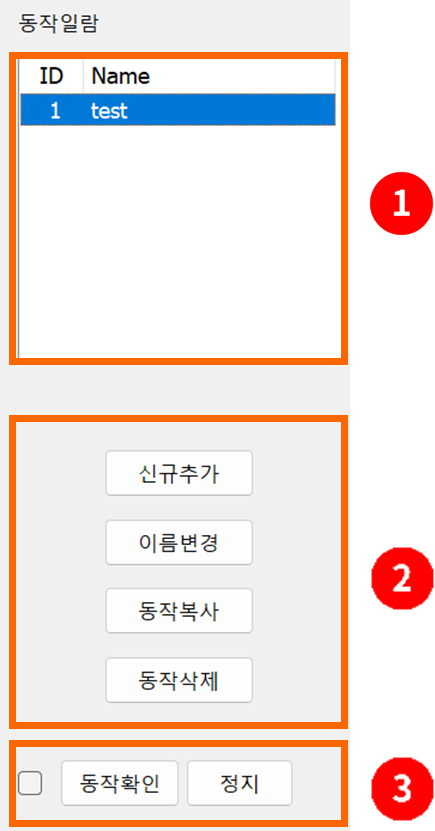
¶ ① Teaching 항목 표시
Teaching 항목이 표시되는 패널로, 항목을 선택하여 다양한 작업을 수행할 수 있습니다.
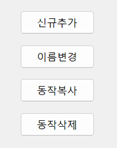
¶ ② 동작 일람 기능 버튼
Teaching 항목을 추가, 이름 변경, 복사 또는 삭제할 수 있는 버튼입니다.
| 버튼 | 설명 |
|---|---|
 |
새 Teaching 항목을 추가합니다. |
 |
Teaching 항목의 이름을 변경합니다. |
 |
선택한 Teaching 항목을 복사합니다. 복사된 항목은 선택한 항목 바로 아래에 위치합니다. |
 |
선택한 Teaching 항목을 삭제합니다. |
¶ ③ Teaching 동작 기능 버튼
티칭 장비 로봇에 Teaching 항목을 적용하여 동작을 즉시 확인할 수 있습니다.

| 버튼 | 설명 |
|---|---|
 |
동작 확인 시 반복 사용을 위한 체크 박스입니다. |
 |
Teaching 항목의 동작을 검토합니다. |
 |
Teaching 항목의 동작을 중지합니다. |
¶ (2) 동작 포인트
Teaching 항목의 세부 동작은 '동작 포인트'로 정의되며, 이를 추가, 수정, 삭제, 복사하고 동작 순서를 조정할 수 있습니다.
¶ ① 동작 포인트 항목 표시
동작 포인트 항목이 표시되는 패널로, 항목을 선택하여 다양한 작업을 수행할 수 있습니다.
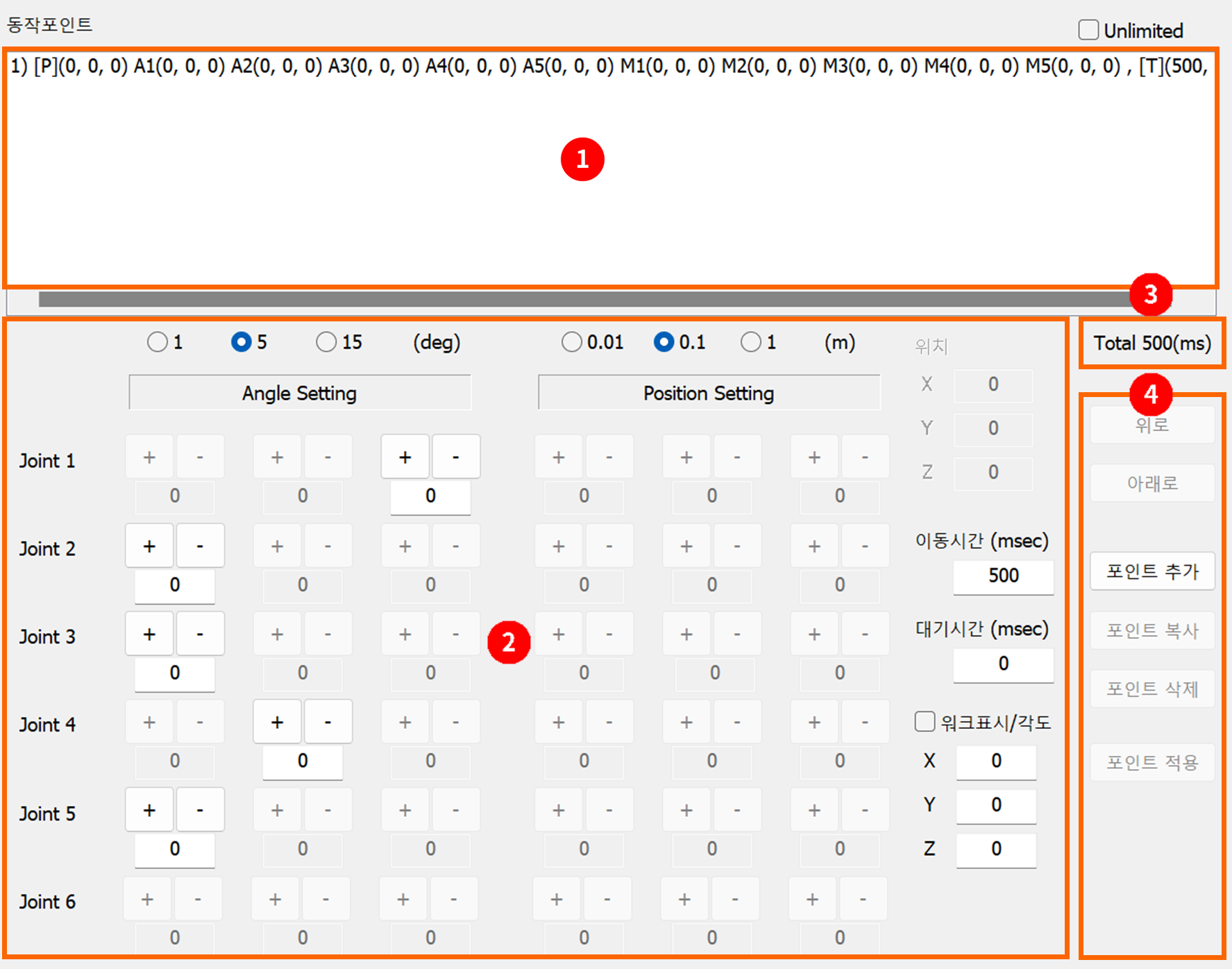
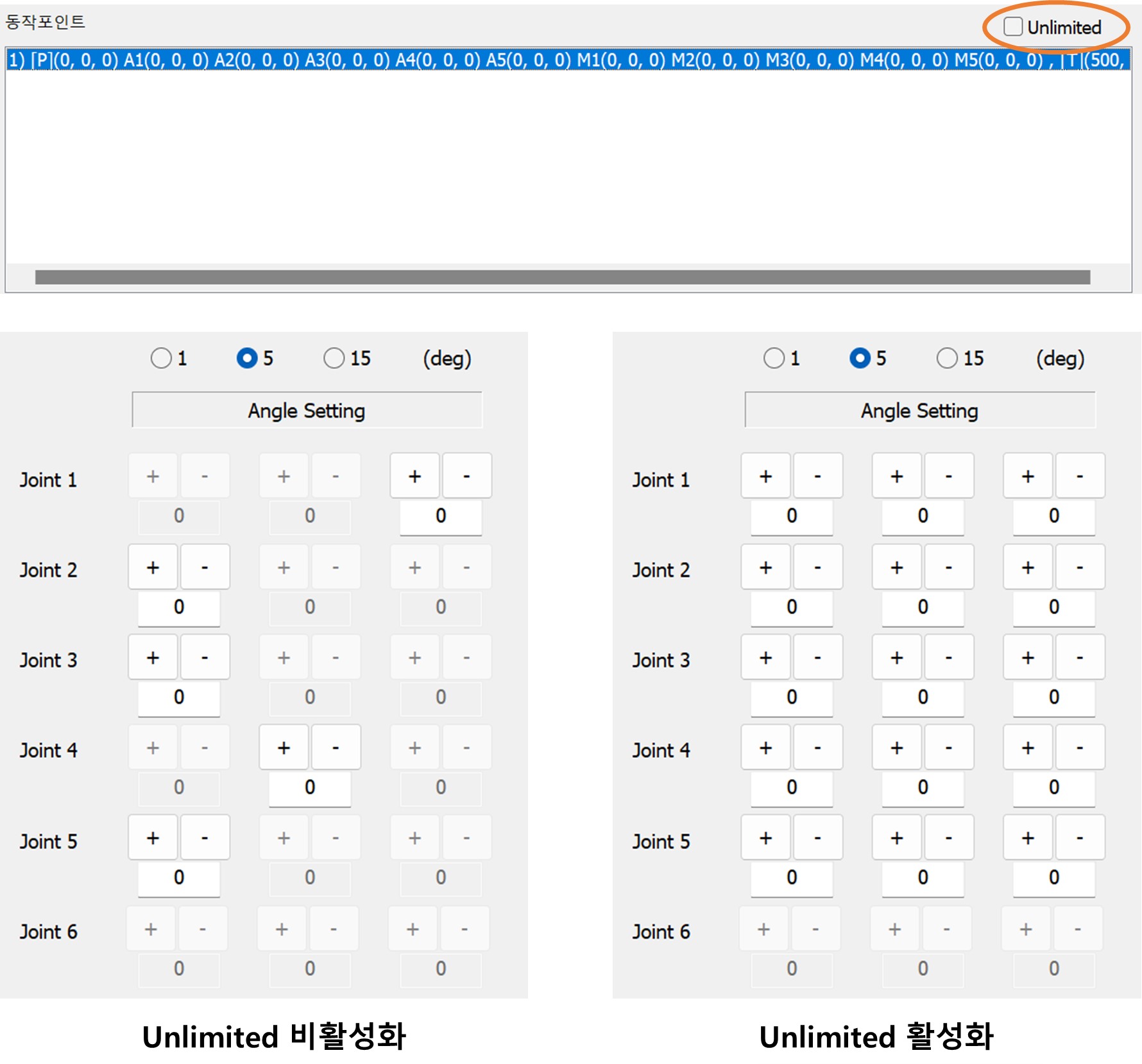
¶ ② 동작 포인트 항목 세부 설정
동작 포인트 항목을 설정할 수 있는 패널로, 다음과 같은 구성 요소가 포함되어 있습니다.
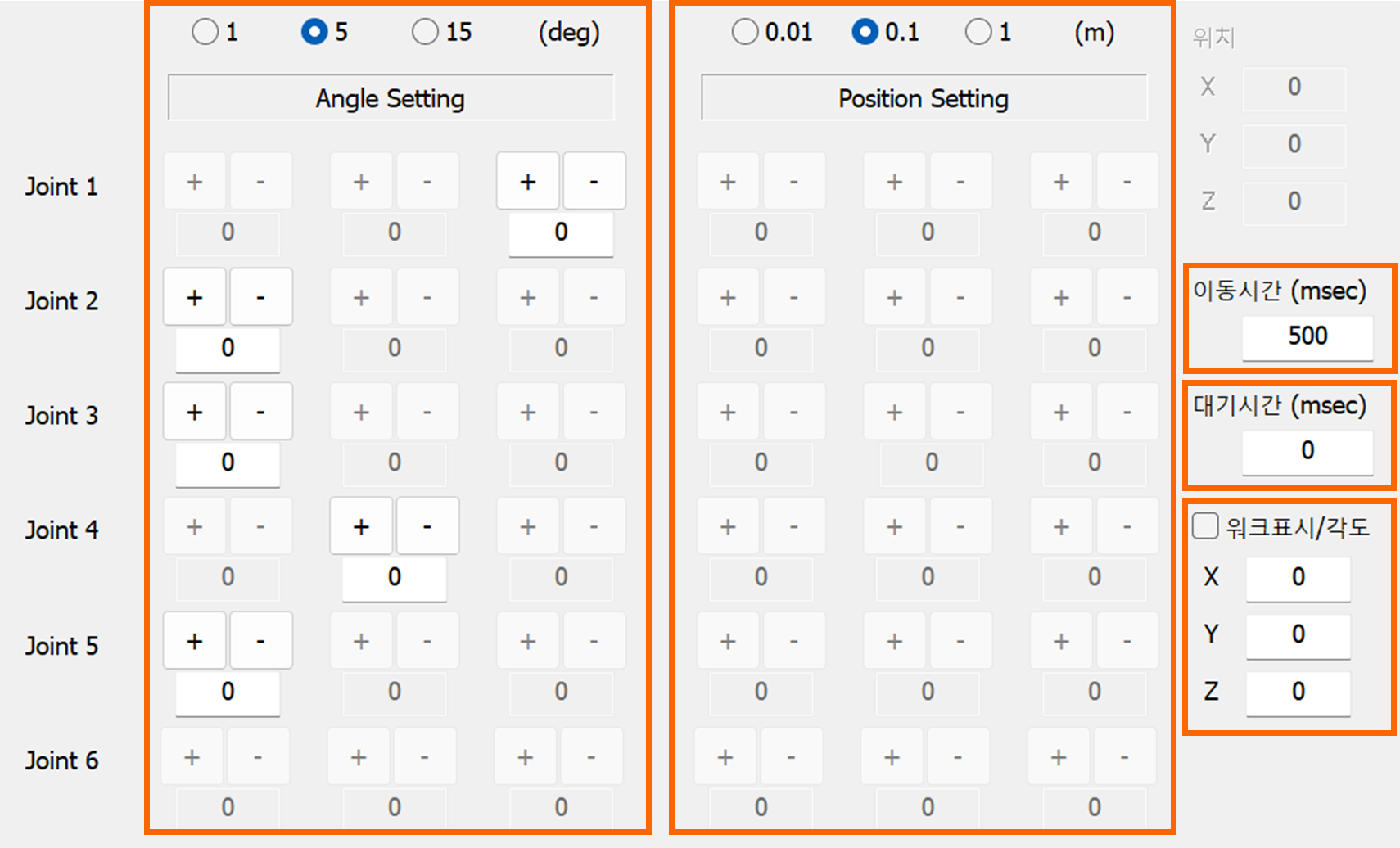
● Angle Setting
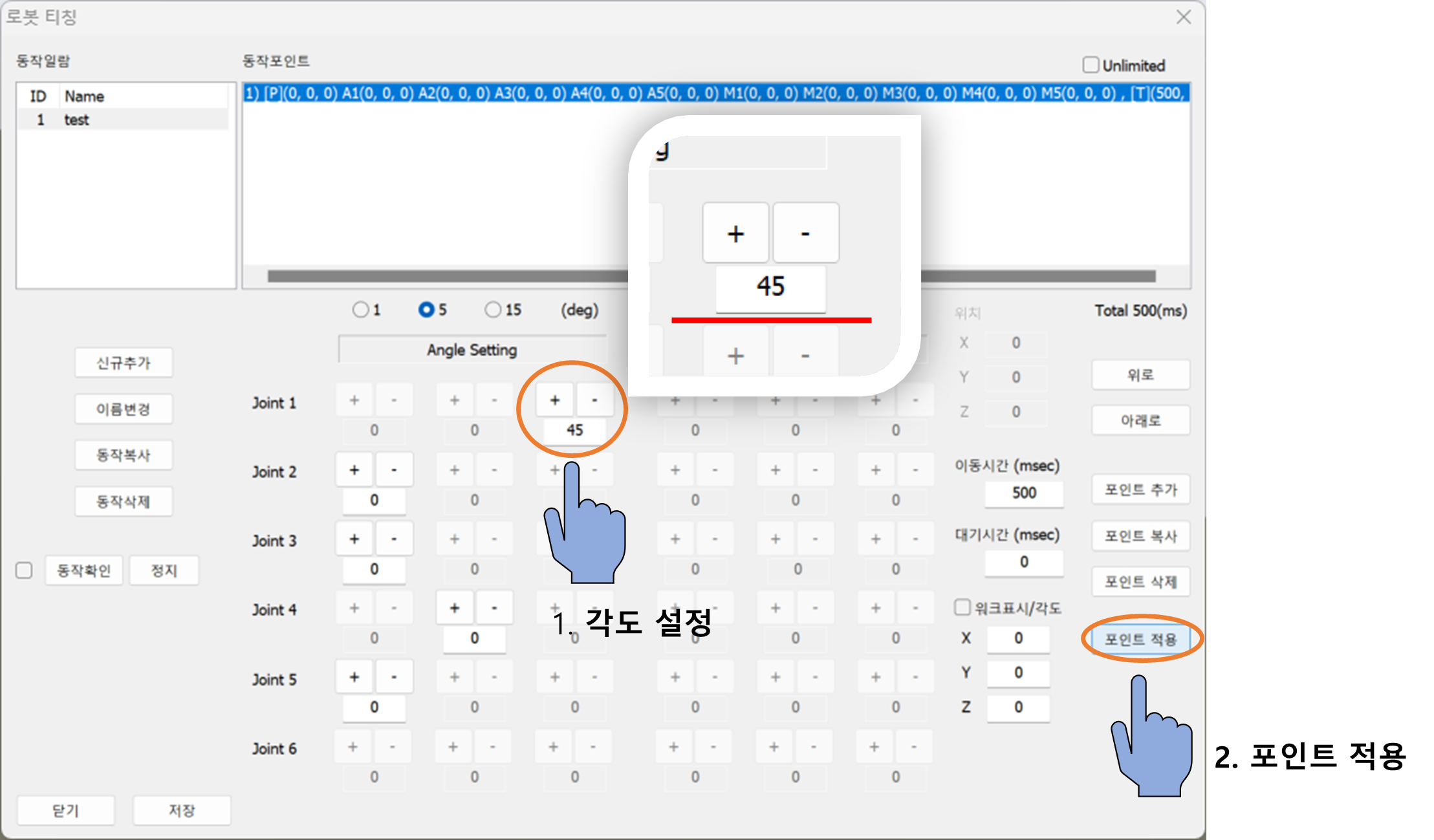
티칭 로봇 장비의 회전 각도를 설정하는 기능입니다. 축별로 조정 가능하며, 최대 6축까지 지원됩니다. 장비에 따라 활성화되는 축이 다를 수 있습니다. 각도는 + 및 – 버튼으로 조정할 수 있으며, 1도, 5도, 15도 단위로 설정할 수 있습니다. 버튼을 클릭하면 설정된 단위만큼 각도가 변경됩니다.

● Position Setting
티칭 로봇 장비의 축 위치를 설정할 수 있는 기능입니다. 축별로 조정 가능하며, 최대 6축까지 지원됩니다. 장비에 따라 활성화되는 축이 달라질 수 있습니다. 위치는 + 및 – 버튼으로 조정할 수 있으며, 0.01m, 0.1m, 1m 단위로 설정 가능합니다. 버튼을 클릭하면 설정된 단위만큼 위치가 변경됩니다.

● 이동시간 (msec)
동작 포인트 항목 간 이동 시간을 설정합니다. 단위는 밀리초(ms)이며, 이전 동작 포인트 항목에서 현재 동작 포인트 항목까지의 이동 시간입니다.
● 대기시간 (msec)
현재 동작 포인트 항목의 대기 시간을 설정합니다. 단위는 밀리초(ms)입니다.
● 워크표시/각도
작업물의 표시 여부를 설정하고, 작업물의 각도를 조정합니다.
| 옵션 | 설명 |
|---|---|
|
작업물의 표시/비표시를 설정하는 체크 박스입니다. |
 |
작업물의 X축을 회전시킵니다. |
 |
작업물의 Y축을 회전시킵니다. |
 |
작업물의 Z축을 회전시킵니다. |
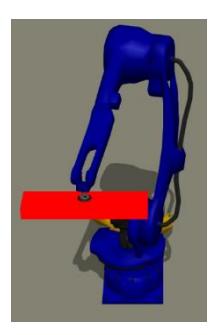
작업물 표시가 적용된 티칭 로봇 장비 예시
● 위치
티칭 로봇 장비의 위치를 이동하기 위한 설정입니다. 현재는 사용하지 않습니다.

¶ ※ 참고 사항
¶ ③ Teaching 항목 시간 표시
Teaching 항목의 총 시간을 나타냅니다. 이는 동작 포인트 항목들의 이동 시간과 대기 시간을 합한 시간입니다.
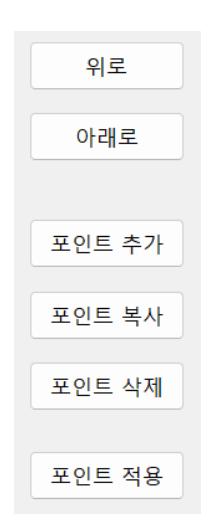
¶ ④ 동작 포인트 항목 기능 버튼
동작 포인트 항목을 추가, 복사, 삭제할 수 있으며, 순서를 위아래로 이동할 수 있습니다.
| 버튼 | 설명 |
|---|---|
 |
선택한 동작포인트 항목의 순서를 위로 이동합니다. |
 |
선택한 동작포인트 항목의 순서를 아래로 이동합니다. |
 |
새 동작포인트 항목을 추가합니다. |
 |
선택한 동작포인트 항목을 복사합니다. 복사된 항목은 선택한 항목 아래에 위치합니다. |
 |
선택한 동작포인트 항목을 삭제합니다. |
 |
선택한 동작 포인트 항목의 세부 설정을 적용합니다. |
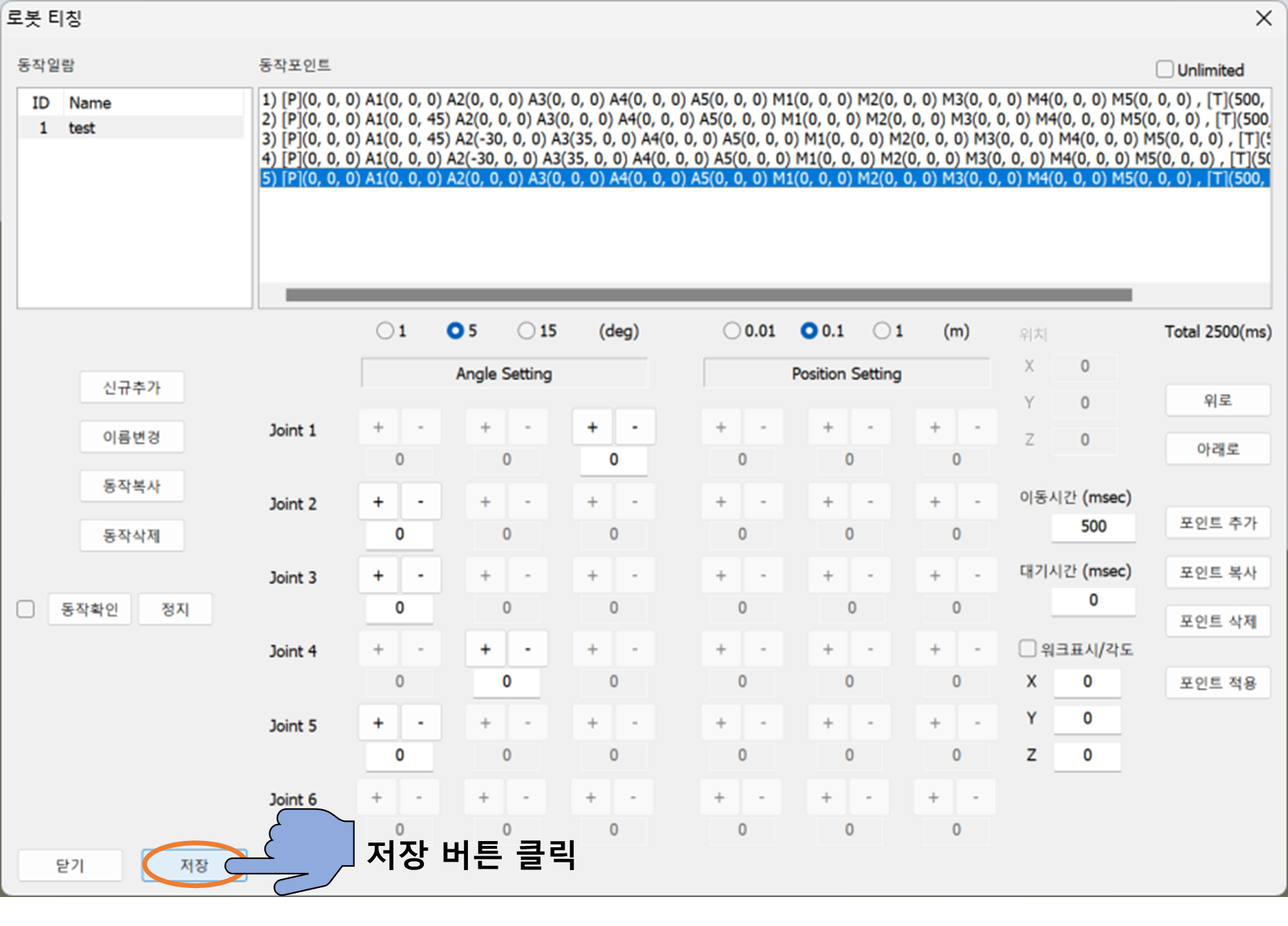
¶ (3) 저장/닫기 기능 버튼
작업 내용을 저장하거나 로봇 티칭 다이얼로그를 닫는 버튼입니다.
¶ 2. 작업 순서
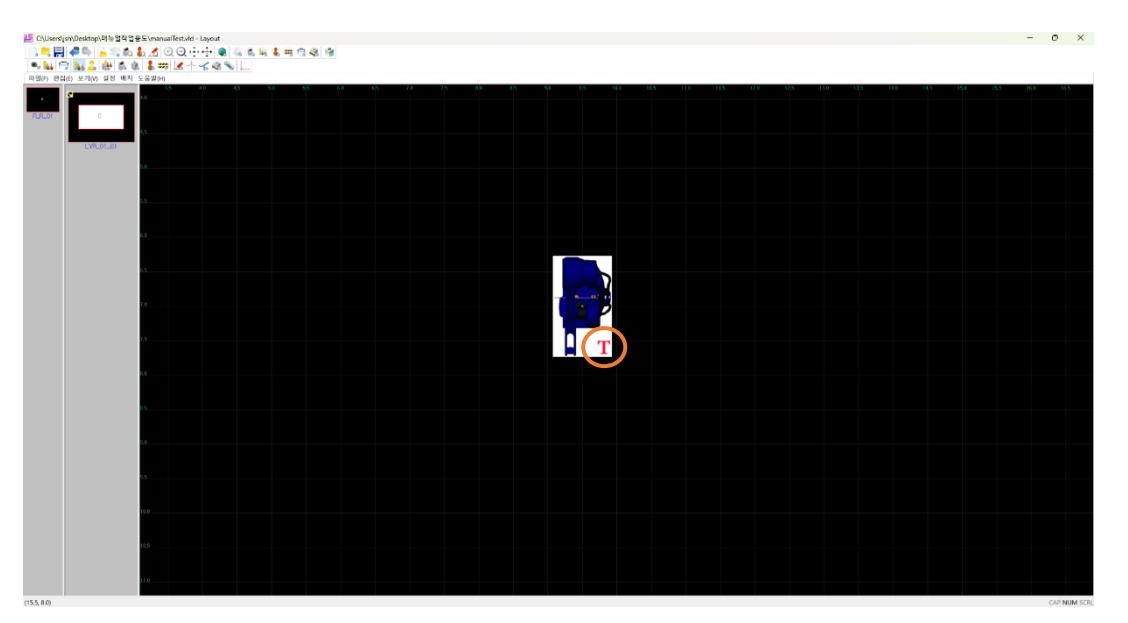
¶ 2-1. 티칭 로봇 장비 배치
Layout Editor에서 티칭 로봇 장비를 배치합니다. 티칭 로봇 장비는 이미지에 'T'로 표시됩니다.
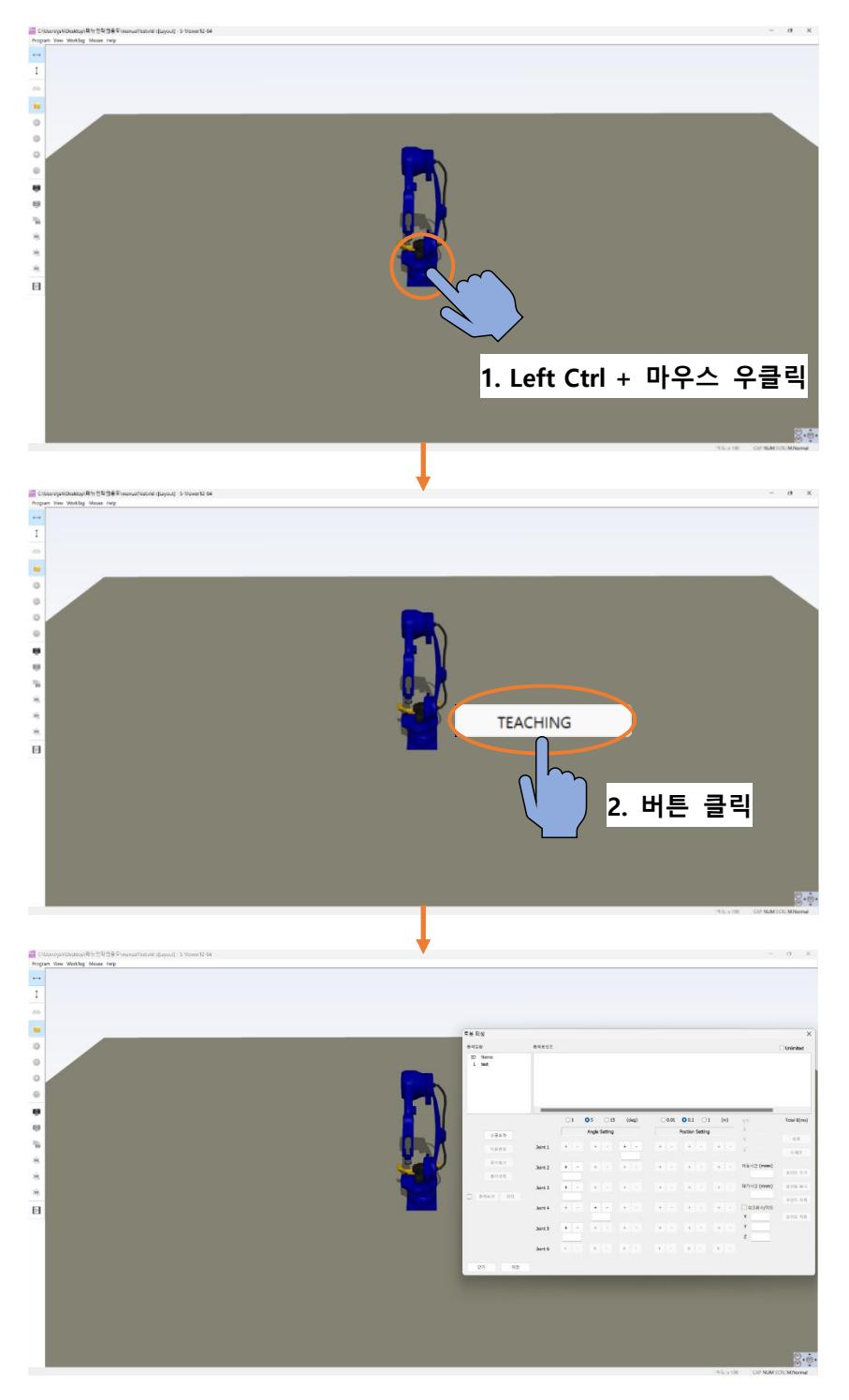
¶ 2-2. 로봇 티칭 다이얼로그 열기
S-Viewer를 열어 배치된 티칭 로봇 장비를 확인한 후, 티칭 로봇 장비의 Base에 마우스 커서를 올리고, 키보드의 Left Ctrl 키를 누른 상태에서 마우스 우클릭을 합니다. TEACHING 버튼을 표시한 뒤, 이 버튼을 클릭하여 로봇 티칭 다이얼로그를 활성화 합니다.
¶ 2-3. Teaching 데이터 작성
새 Teaching 항목을 만든 후, 동작 포인트를 설정합니다. 동작 포인트 항목의 세부 설정이 완료되면 '포인트 적용' 버튼을 눌러 데이터가 올바르게 적용되도록 합니다.
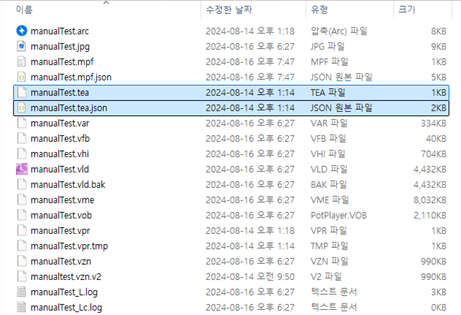
¶ 2-4. 저장
Teaching 데이터 작성을 완료한 후 저장합니다. 저장된 파일은 Layout Editor에서 작업한 폴더에 위치하며, '파일이름.tea' 와 '파일이름.tea.json' 두 개의 파일로 저장됩니다.
¶ 3. Teaching 웹 브라우저 적용
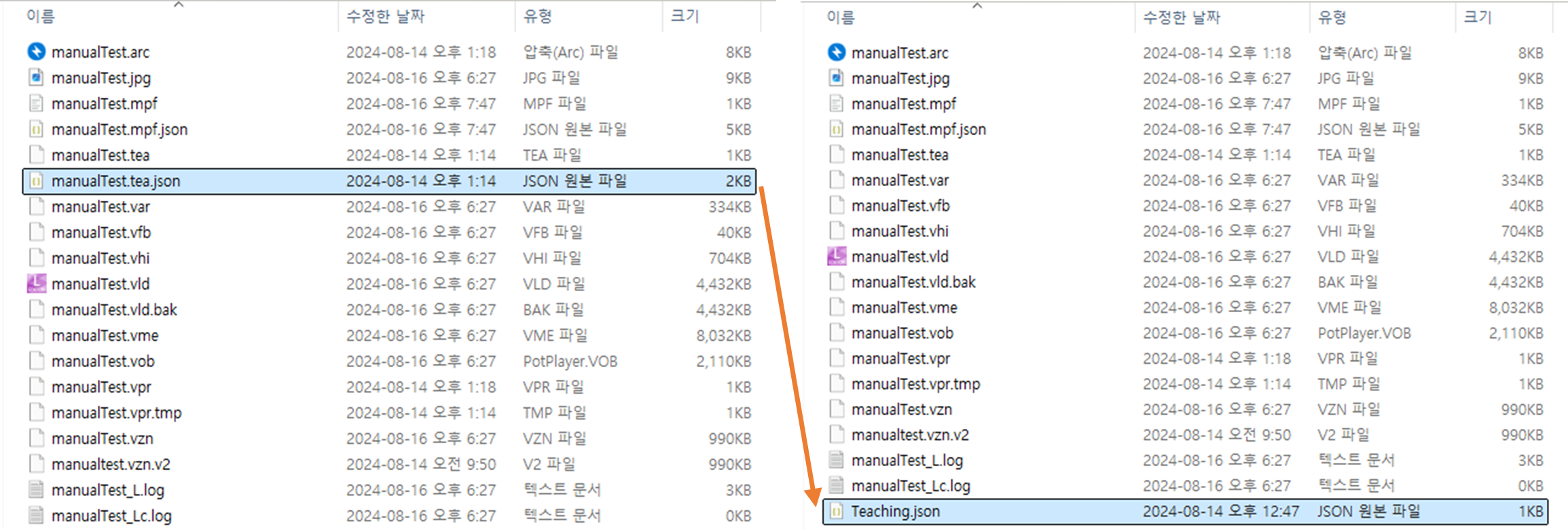
¶ 3-1. 파일 이름 변경
Teaching 파일의 이름을 변경합니다. Teaching 파일은 Layout Editor에서 작업하고 저장한 폴더에 위치하며, 파일 이름을 **'파일이름.tea.json'**을 **'Teaching.json'**으로 변경합니다.
¶ 3-2. 웹 브라우저 로그인
Teaching을 적용할 웹 브라우저에 로그인합니다.
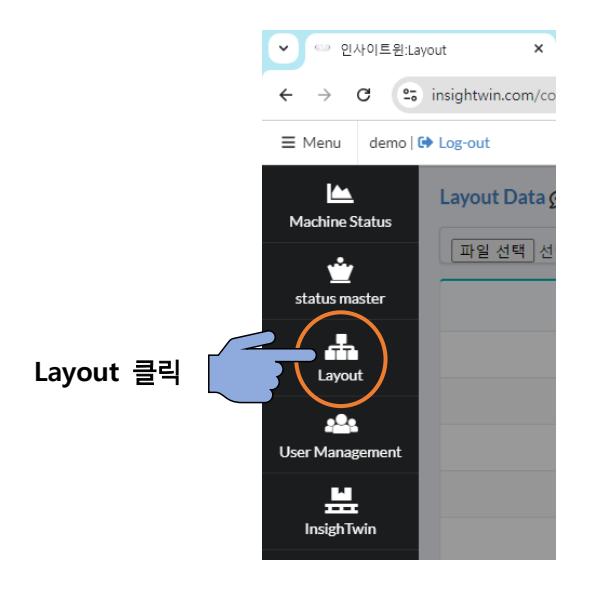
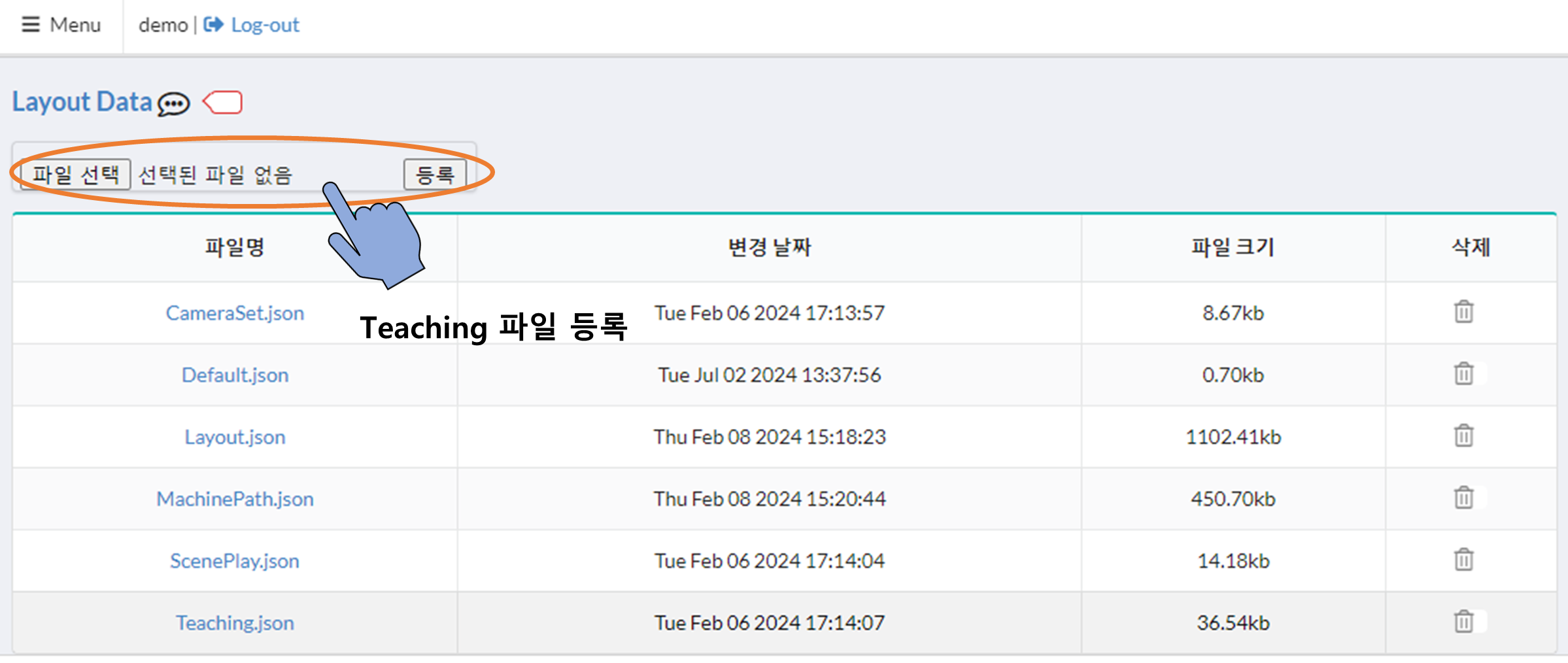
¶ 3-3. 파일 등록
메뉴에서 Layout 항목을 클릭하여 Teaching 파일을 등록합니다. 파일 등록은 파일 선택 버튼을 클릭하거나 **'선택된 파일 없음'**란에 Teaching.json 파일을 드래그 앤 드롭하여 등록합니다.
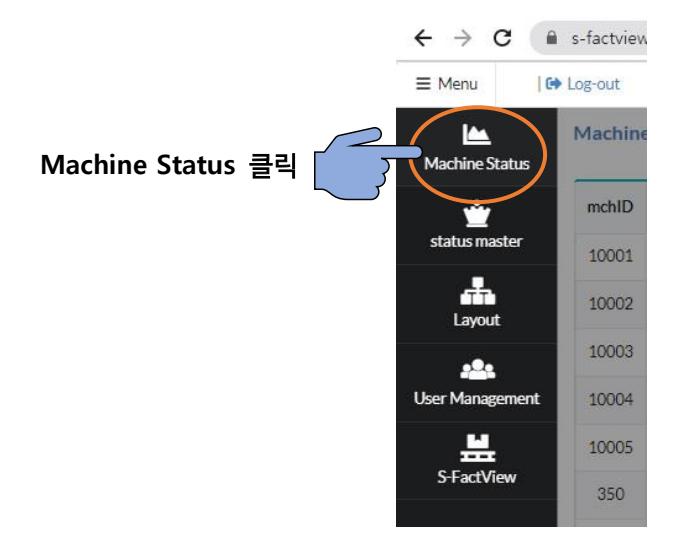
¶ 3-4. Machine Status 설정
메뉴에서 Machine Status 항목을 클릭하여 Teaching 설정을 합니다. Teaching 설정은 Machine Status에서 장비 ID (mchID)를 입력한 후, 'monitorProc' 필드에 Teaching을 설정합니다
| 입력 방식 | 예시 |
|---|---|
| T=동작 일람 번호 |